






























































Self-driving cars are poised to become a reality in the very near future. These cars rely extensively on a range of AI and ML based algorithms to ply safely and reliably, and to make ethical decisions in the midst of traffic. Let’s take a quick look at some of these algorithms.
Self-driving cars exemplify the intersection of artificial intelligence (AI) and real-world applications. The technology behind self-driving cars relies on AI algorithms that enable vehicles to navigate roads, recognise objects, and make decisions based on the environment.
One of the most critical components of self-driving cars is computer vision, which uses AI algorithms to process and interpret visual data from cameras and sensors mounted on the vehicle. Computer vision enables self-driving cars to detect and classify objects on the road, including other vehicles, pedestrians, and traffic signs. This information is then used to determine the vehicle’s speed, direction, and any necessary actions to avoid collisions.
Another essential component of self-driving cars is machine learning, a type of AI that allows the vehicle to learn from experience and improve its performance over time. Self-driving cars use machine learning algorithms to analyse vast amounts of data collected from sensors, cameras, and other sources. The algorithms then use this data to make predictions about the environment, such as the behaviour of other drivers or changes in road conditions.
Self-driving cars also depend on various other AI technologies, such as natural language processing, which allows the vehicle to understand spoken commands from passengers. Additionally, decision making algorithms empower the car to make informed decisions based on factors like road conditions, traffic patterns, and the vehicle’s own capabilities.
Despite the progress made, there are significant challenges associated with the development and deployment of self-driving cars. Perhaps the most crucial is ensuring the safety and reliability of these vehicles. Self-driving cars must be able to operate safely in diverse conditions, including heavy traffic and adverse weather. Furthermore, they should adapt to unexpected situations, such as road closures or accidents.
Ethical implications are also a concern in the realm of self-driving cars. For example, these vehicles may face decisions that involve balancing the safety of passengers with the safety of other road users like pedestrians or cyclists. This raises complex ethical questions that must be carefully considered and addressed.
Several companies are currently working on developing self-driving car technology.
Waymo (owned by Alphabet Inc., Google’s parent company), Tesla, Uber, General Motors Cruise (San Francisco), Baidu (China and the United States), Aptiv (Las Vegas) and Mobileye (a subsidiary of Intel and Apple) are some of the key players who have already released their self-driving cars and are evolving the tech.
As the technology continues to advance, we can expect to see more companies entering the market leading to further progress towards fully autonomous vehicles.
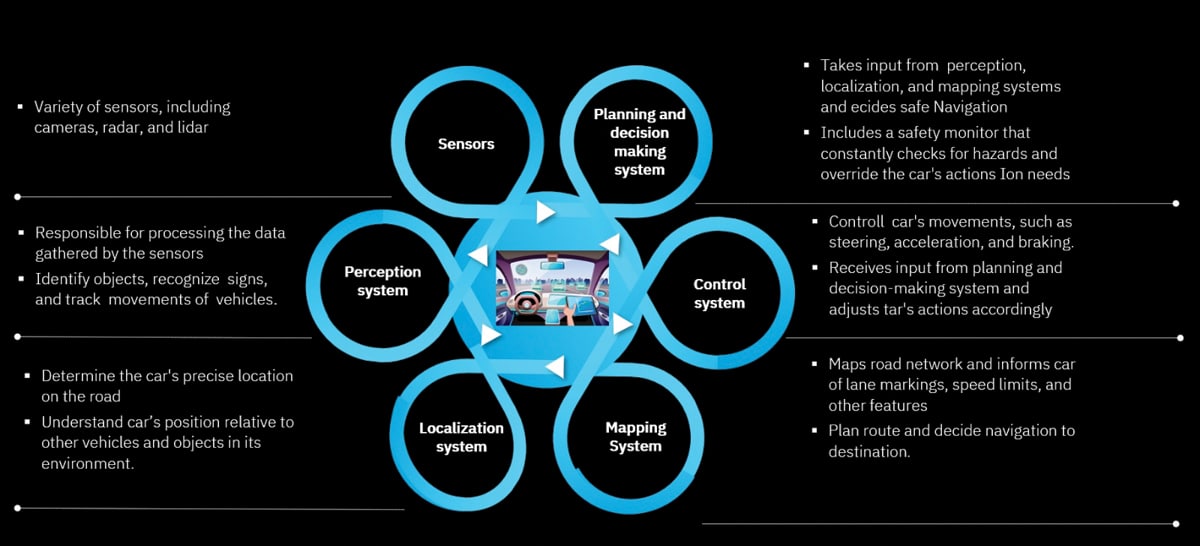
The architecture of self-driving cars
The architecture of a self-driving car is complex, consisting of multiple subsystems, sensors, and algorithms.
The human-machine interface acts as the user interface, enabling the car’s occupants to interact with the vehicle and control its actions. It incorporates features like touch screens, voice commands, and physical controls (see Figure 1).
The architecture of a self-driving car is constantly evolving, and new technologies and approaches are being developed to improve its safety, reliability, and efficiency. As these technologies continue to advance, we can expect to see more widespread adoption of self-driving cars in the future.
AI and machine learning
Self-driving cars use a combination of AI techniques, including deep learning, reinforcement learning, machine learning, and neural networks to analyse and interpret data from sensors and make decisions about how to navigate the car safely and efficiently.
Deep learning employs neural networks with multiple layers to analyse and interpret complex data. This is particularly effective in tasks such as object recognition and image classification, which are crucial for self-driving cars.
Reinforcement learning assists self-driving cars in learning from their environment through trial-and-error interactions. It enables training the car to make decisions based on its current state and desired outcomes, such as safely navigating to a destination.
Machine learning encompasses various techniques for analysing and interpreting data. It plays a vital role in processing data from sensors and making decisions about how to safely and efficiently navigate the car.
Neural networks are used in self-driving cars to analyse and interpret data from sensors and enable decisions about how to navigate the car.
Machine/deep learning algorithms used in self-driving cars
Self-driving cars employ several algorithms, each playing a crucial role in enabling the vehicle to navigate its environment safely and efficiently. Here are some of the key algorithms used by the systems shown in Figure 1.
Computer vision: Computer vision algorithms interpret images and video data from cameras mounted on the vehicle. They identify objects in the car’s environment, such as other vehicles, pedestrians, traffic signs, and traffic lights. Table 1 gives a description of these algorithms.
| Algorithm | Description |
| Convolutional neural networks (CNNs) | These are deep learning algorithms that analyse visual data and classify objects in the environment. CNNs are commonly used in object detection and recognition tasks. They can learn to recognise complex patterns and shapes, making them effective in identifying objects in real-world environments. |
| Semantic segmentation | Used to separate the environment into different regions, such as roads, sidewalks, and buildings. This helps the vehicle to understand the layout of the environment and identify objects more accurately. It works by assigning each pixel in an image to a particular class, which can help the vehicle navigate the environment more effectively. |
| Optical flow | Used to estimate the motion of objects in the environment. This information predicts the trajectory of objects, such as other vehicles or pedestrians. It works by analysing the changes in brightness between video frames to determine the direction and speed of motion. Optical flow is helpful in detecting unexpected changes in movement including sudden stops or changes in direction. |
| Stereo vision | Uses two cameras to create a 3D representation of the environment. This enables the vehicle to estimate the distance to objects and plan its movements accordingly. It works by analysing the differences between the images captured by two cameras, to calculate the distance to objects in the scene. Stereo vision is useful in detecting obstacles and estimating the size and position of objects in the environment. |
| Lane detection | Used to identify the lanes on the road and ensures that the vehicle stays within them. This is typically achieved through image processing techniques, such as edge detection and Hough transforms. It works by analysing the edges in an image to identify the boundaries of the lanes. Lane detection is useful in keeping the vehicle in the correct lane and avoiding collisions with other vehicles. |
| Object detection | Used to identify objects in the environment, such as vehicles, pedestrians, and bicycles. This is typically achieved through machine learning algorithms, such as CNNs. Object detection algorithms can locate objects in an image or video and determine their class, position, and size. They are used in a variety of tasks including collision avoidance and pedestrian detection. |
| Image recognition | Used to identify objects in the environment based on their appearance. This is typically achieved through machine learning algorithms, such as CNNs. Image recognition algorithms can classify objects in an image or video and determine their class. They are useful in detecting and identifying objects in the environment like road signs and traffic lights. |
| Object tracking | Used to track the movement of objects in the environment, such as other vehicles and pedestrians. This is typically achieved through a combination of prediction and filtering techniques to track the object’s movement. Object tracking algorithms can estimate the object’s position and velocity over time and predict its future position. They are useful in a variety of tasks, such as collision avoidance and pedestrian detection. |
Table 1: Computer vision algorithms
Lidar processing: Lidar (light detection and ranging) sensors are used to create a 3D map of the car’s environment. Algorithms are used to process the data collected by these sensors to create a high-resolution map that the car can use for navigation. Some of the key algorithms used in lidar processing for self-driving cars are listed in Table 2.
| Algorithm | Description |
| Point cloud segmentation | Used to separate the lidar data into individual objects, such as cars, pedestrians, and buildings. This enables the car to identify and track objects in its environment. |
| Object detection and classification | Used to identify the type of objects in the environment, such as cars, pedestrians, and bicycles. These algorithms use a combination of geometric and appearance-based features to identify objects in the lidar data. |
| Simultaneous localisation and mapping (SLAM) | Simultaneous localisation and mapping (SLAM) algorithms are used to create a map of the environment in real-time. This involves using the lidar data to create a 3D map of the environment, as well as tracking the vehicle’s position and orientation within that map. |
| Object tracking | Used to track the movement of objects in the environment, such as other vehicles and pedestrians, using a combination of prediction and filtering techniques to track the object’s movement. |
| Sensor fusion | Used to integrate lidar data with other sensor data, such as camera and radar data to improve its accuracy and reliability in identifying and tracking objects in the environment. |
| Localisation | Localisation algorithms are used to determine the car’s precise location in the world using data from a variety of sources, including GPS, lidar sensors, and cameras, to pinpoint the car’s location. |
Table 2: Algorithms used in lidar processing
By processing the lidar data with these algorithms, self-driving cars can identify and track objects in real-time, create accurate maps of the environment, and precisely locate themselves within that environment.
Path planning: Path planning algorithms are used to determine the optimal route for the car to reach its destination. These algorithms consider factors such as traffic conditions, road conditions, and the location of other vehicles on the road (Table 3).
| Algorithm | Description |
| A* Search algorithm | This searches for the shortest path between start and end points, while taking into account the distance to the goal and obstacles in the environment. |
| Probabilistic roadmap (PRM) | Generates a roadmap of the environment by randomly selecting points and connecting them with paths. Searches for the shortest path between start and end points using the roadmap. |
| Rapidly-exploring random trees (RRT) | Constructs a tree of possible paths from the start to the end point by exploring the environment by randomly selecting points and extending the tree towards them. Searches for the shortest path between start and end points using the tree. |
| Dynamic programming | Finds the shortest path between the start and end points by recursively solving sub-problems. |
Table 3: Path Planning Algorithm
Each of these algorithms has its strengths and weaknesses, and the choice of which algorithm to use depends on the specific needs of the self-driving car system and the characteristics of the environment it operates in.
Control: Control algorithms are used to control the car’s speed, steering, and braking. These algorithms consider the car’s current speed and location, as well as the route planned by the path planning algorithms to make decisions about how to safely navigate the vehicle (Table 4).
| Algorithm | Description |
| Adaptive cruise control (ACC) | Enables the vehicle to maintain a safe distance from the vehicle in front of it by adjusting the speed of the car using sensors such as radar or lidar. |
| Lane keeping assistance (LKA) | Helps the vehicle stay within its lane by detecting lane markings on the road using cameras or other sensors and applying steering corrections. |
| Automatic emergency braking (AEB) | Automatically applies the brakes in emergency situations using sensors such as radar or cameras to detect obstacles in the vehicle’s path and avoid a collision. |
| Path planning | Determines the best path for the vehicle to follow through its environment using data from sensors such as lidar and cameras to create a map of the environment and determine the safest and most efficient path for the vehicle to follow. |
| Trajectory planning | Determines the vehicle’s movement and speed along the path, considering factors such as the vehicle’s speed, steering angle, and braking to plan a safe and efficient trajectory along the path. |
Table 4: Control algorithms
Reinforcement learning: Reinforcement learning (RL) algorithms are used to enable the car to learn from its interactions with the environment. These algorithms allow the car to improve its performance over time by learning from its mistakes and adjusting its behaviour accordingly (Table 5).
| Algorithm | Description |
| Q-Learning | Enables the vehicle to learn from its experiences and make decisions based on a reward system. |
| Deep Q-Network (DQN) | A variant of Q-Learning that uses deep neural networks to estimate the Q-values of different actions. |
| Policy gradient | Learns a policy for selecting actions in different situations and uses gradient descent to optimise the policy. |
| Actor-Critic | Combines Q-Learning and policy gradient techniques to improve the accuracy and stability of the learning process. |
| Deep deterministic policy gradient (DDPG) | Combines Q-Learning and policy gradient techniques with deep neural networks to estimate the value of actions and select the best actions. |
Table 5: Reinforcement learning algorithms
RL algorithms have shown great promise in enabling self-driving cars to learn from their experiences and make better decisions over time.
Final thoughts
By combining these algorithms with advanced sensors and control systems, developers are working to create fully autonomous vehicles that can safely navigate even the most complex environments.
Self-driving cars are an exciting example of the real-world applications of AI. However, there are significant challenges associated with the development and deployment of these cars, particularly regarding safety, reliability, and ethics. As the technology continues to advance, it will be essential to address these challenges to ensure that self-driving cars can be safely and responsibly integrated into our transportation systems.


















{kind=link}